Projekte
Nachfolgend eine Auswahl an laufenden und abgeschlossenen Forschungsprojekten
VRoboCoop - Verlässliche und vertrauensvolle Mensch-Roboter-Kollaboration
Vorrangiges Projektziel ist die Erforschung von eindeutig berechenbaren Darstellungsformen von MRK-Prozessen für kollaborative Robotikprozesse, um Sicherheit und Effizienz in der kollaborativen Robotik zu
gewährleisten.
FELICE - FLEXIBLE ASSEMBLY MANUFACTURING WITH HUMAN-ROBOT COLLABORATION AND DIGITAL TWIN MODELS
Das Projekt zielt auf das vorrangige Anwendungsgebiet der agilen Produktion und ist bestrebt, die Montageprozesse der nächsten Generation zu entwerfen, die erforderlich sind, um aktuelle und dringende Bedürfnisse in der Fertigung effektiv zu erfüllen.
Zu diesem Zweck sieht es adaptive Arbeitsräume und mehrere kognitive Roboter vor, der mit den Mitarbeitern in Montagelinien zusammenarbeiten.FELICE vereint multidisziplinäre Forschung in den Bereichen kollaborative Robotik, KI, Computer Vision, IoT, maschinelles Lernen, Datenanalyse, cyber-physikalische Systeme, Prozessoptimierung und Ergonomie, um eine modulare Plattform, die eine Reihe von autonomen und kognitiven Technologien integriert und harmonisiert, zu entwickeln.

Smarter - Slope Maintenance Automation using Real-Time Telecommunication and advanced Environment Recognition
Das Projekt SMARTER beschäftigt sich mit komplexen Problemstellungen, die sich beim Einsatz automatisierter Nutzfahrzeuge und Arbeitsmaschinen im öffentlichen Raum abseits der Straße ergeben.
Die grundlegenden Regularien und Anforderungen in Zusammenhang mit dem Mähen in Böschungen entlang von Verkehrstrassen sollen für die Entwicklung geeigneter Sicherheits- und Bedienkonzepte identifiziert werden. Dabei werden auch sicherheitstaugliche Komponenten bewertet, ausgewählt, und als Teil eines integrierten Sicherheitskonzepts eingesetzt. Die Verbesserung bestehender Automatisierungssysteme in Hinblick auf den Einsatz ohne lokale Überwachung soll damit vorangetrieben werden.
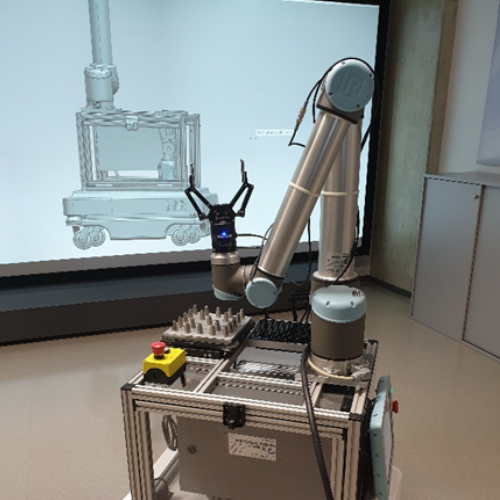
Plugbot - Plug and Produce Robotic Building Blocks
Hauptziel des Projekts PlugBot ist die Umsetzung einer Entwicklungs-, Integrations- und Konfigurationsumgebung für modulare und sichere Roboterbaukastensysteme.
Das Gesamtsystem zielt bei der Entwicklung auf Experten mit Programmierkenntnissen ab, bei der Konfiguration, beim Anlagenbetreiber, auf nicht speziell geschulte Bediener. Für eine systemübergreifende Integration ist es notwendig, Schnittstellenstandards für heterogene Robotersysteme weiterzuentwickeln. Innovative Programmiertools setzen rezepturbasierte Programmierkonzepte um und vereinen zahlreiche Tools in einer Toolchain. Das neuartige System erlaubt Debugging, Programmierung, Konfiguration und Integration komplexer Roboteranwendungen.
Human Centered Workplace 4 Industry
Das Projekt HCW4i hat zum Ziel, die Anlernphase und die tägliche Arbeit durch automatisch konfigurierbare, maschinelle Assistenzmaßnahmen in der Produktionseinheit zu minimieren oder zu unterstützen. Diese Assistenzmaßnahmen reichen von produktspezifischen Arbeitsanweisungen auf einem Bildschirm über Augmented Reality Systeme bis zu kollaborativen Robotern am Arbeitsplatz.
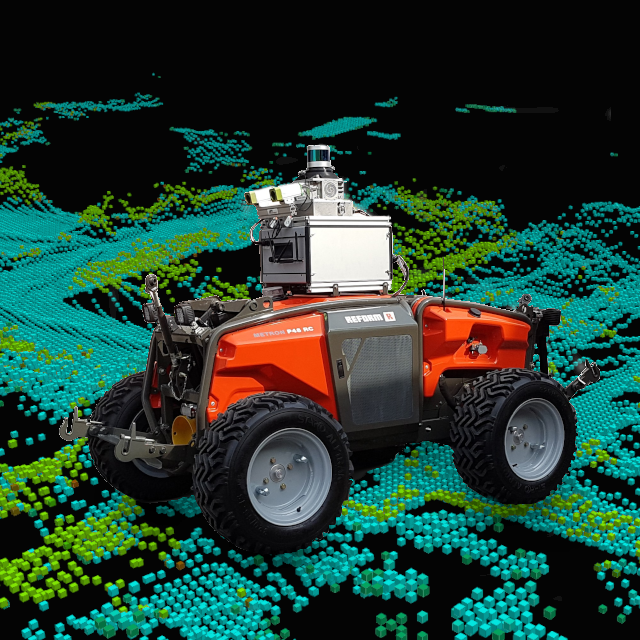
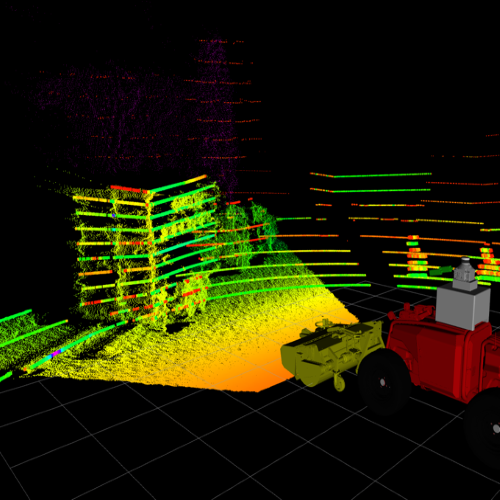
AUTILITY - Automated utility vehicle for transportation and work processes
Das Forschungsprojekt AUTILITY beschäftigt sich mit der Automatisierung von Arbeits- und Transportaufgaben im Bereich Flächenbearbeitung und Luftfrachttransport. Im Zuge des Projekts soll ein multifunktionales Zugfahrzeug für den automatisierten Einsatz weiterentwickelt und unter realen Bedingungen getestet werden.
Ziel des Projekts ist die Erforschung, Entwicklung und Demonstration von Schlüsseltechnologien, die automatisierte Transport- und Arbeitsabläufe ermöglichen. Die angestrebten Technologien sind Kernelemente in einem Prozess von der Wahrnehmung bis zur Entscheidung und umfassen: (i) Das Verstehen der Szene und ihrer Beziehungen durch neue Ansätze der Objektklassifikation und Posenschätzung basierend auf maschinellem Lernen sowie Methoden für die zuverlässige Erkennung von Objekten und Objektmerkmalen und (ii) die zuverlässige und sichere Outdoor-Lokalisierung und -Kartierung basierend auf multimodalen Ansätzen und innovativen kamerabasierten Methoden. Die Fusion diverser Sensordaten dient dazu, zuverlässige Hinderniserkennung und Kollisionsvermeidung zu gewährleisten. Die Untersuchung geeigneter Systemarchitekturen, Datenverarbeitungsplattformen und Kommunikationsmechanismen unter Berücksichtigung der Sicherheitsanforderungen ist Voraussetzung für den Betrieb in sicherheitskritischem Umfeld.
HOPPER - Handling of man-made Objects using automated Positioning, Planning and Enhanced Reasoning methods
Im Projekt HOPPER soll ein breites Feld an Tätigkeiten automatisiert werden: das Be- und Entladen in verschiedenen angewandten Aufgabengebieten. Um komplexe Operationen zwischen mehreren großen Maschinen/Objekten durchzuführen, erfordert das Erreichen der Zentimetergenauigkeit eine eindeutige Abstraktion der umgebenden Szene und ihrer Beziehungen. Die dabei entstehende technologische Antwort auf die aufgabenspezifischen Herausforderungen basiert auf einer Reihe sich ergänzender Repräsentationen und einer optimalen Pfad- und Bewegungsplanung mit nichtlinearen Einschränkungen.

Ich helfe dir bei der Studienwahl.