Neues FH OÖ Forschungsprojekt: Weniger Verkehrsunfälle durch automatisiertes, vernetztes Fahren
Fahrzeughersteller und Technologieunternehmen, Forschungsinstitute, ÖAMTC und Behörden erarbeiten im Forschungsprojekt „COPE – Collective Perception“ einen wichtigen nächsten Schritt im Umfeld des automatisierten und vernetzten Fahrens im urbanen Umfeld. Die Kernfrage in diesem neuen Forschungsprojekt lautet: „Wie können Kreuzungssituationen durch Kooperation und Kommunikation (C-ITS) aller Verkehrsteilnehmer*innen ‚sicherer‘ gemacht werden?“. Koordiniert wird das Projekt vom Logistikum des FH OÖ Campus Steyr.
Mehr Sicherheit vor allem für ungeschützte Verkehrsteilnehmer*innen („Vulnerable Road Users“, kurzVRUs) steht im Forschungsfokus. Projektleiter Wolfgang Schildorfer dazu: „Insbesondere für Fußgänger*innen, Radfahrer*innen, Motorradfahrer*innen ergeben sich durch automatisierte Fahrzeuge mit verbesserter Sensorik und Fahrzeugvernetzung besondere Potentiale zur Reduktion von Verkehrsunfällen und Todesfällen. Die Statistik Austria zeigt für 2018 in Österreich 4.172 registrierte Motorradunfälle. 102 Motorradfahrer*innen wurden dabei getötet wobei die Hauptursache bei ca. 5% der Unfälle die Ursache eine „Vorrangverletzung, Rotlichtmissachtung“ war. Ca. 50% der Unfälle passieren im Ortsgebiet, ca. 25% im Kreuzungsfall und ca. 16% bei Ampelvollbetrieb.“
Verkehrsunfälle verhindern, Kollisionsschwere reduzieren
Ein zentrales Ziel und angestrebter Vorteil des automatisierten Fahrens ist die Verhinderung von Unfällen bzw. die Reduktion der Kollisionsschwere. Ein wesentlicher Baustein dabei sind Systeme, wie etwa die „Autonome Notbremse“ oder „Kollisionswarnung“, welche zur Steigerung der Fahrzeugsicherheit beitragen. Entgegen der sprachbezogenen Erwartungshaltungen bestehen bei derartigen Systemen aktuell noch wesentliche Verbesserungspotentiale auf Österreichs Straßen. Die System-Effektivität und Effizienz im realen Umfeld – mit allen Schwierigkeiten der Sensorik und Prognose von Verkehrs- und Kollisionssituationen – könnte mit neuen Ansätzen noch bedeutend gesteigert werden. Im Wesentlichen geht es dabei um Unfälle, welche aus der Sicht des Einzelfahrzeugs und der aktuell darin verfügbaren Sensorik nicht ausreichend prognostiziert werden können und eine Entscheidung für die Auslösung einer harten Sicherheitsaktion (einer Notbremsung) nicht eindeutig getroffen werden kann.
Bessere Prognosen durch kollektive Information aller Verkehrsteilnehmer*innen
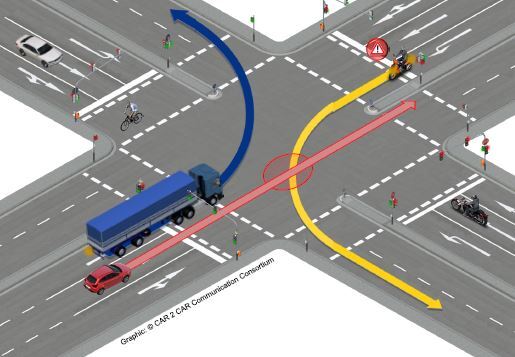
Ziel vom Forschungsprojekt „COPE – Collective Perception“ ist es, die Potentiale für den nächsten anstehenden Innovationsschub in der Fahrzeug- und Verkehrssicherheit durch die intelligente Kombination der Informationen aller Verkehrsteilnehmer*innen in eine Art „Collective Perception“ und „Situation Awareness“ zu heben, welche durch eine Vernetzung der Verkehrsteilnehmer*innen entsteht („V2X, I2X Communication“) und durch die Kollaboration aller vernetzten Verkehrsteilnehmer*innen zu einer Reduktion von Unfällen führt. Die Fahrzeug-Sensorik wird dabei mit Informationen von anderen vernetzten Fahrzeugen und der Infrastruktur erweitert. Der erwartete Nutzen – Vermeidung von Unfällen mit VRUs, insbesondere in urbanen Räumen/ampelgeregelten Kreuzungen – ist die Hauptmotivation für das Projekt COPE (Collective Perception)
Daraus abgeleitet steht folgende übergeordnete Fragestellung für das Projektteam im Mittelpunkt: Wie können Kreuzungssituationen durch die Kooperation und Kommunikation (C-ITS) aller Verkehrsteilnehmer*innen „sicherer“ gemacht werden?
Ein wesentlicher Innovationspunkt ist die gewählte Top-Down-Vorgehensweise, bei welcher nicht einzelne Anwendungsbeispiele in reduktionistischer Form isoliert betrachtet werden, sondern der Fokus liegt vielmehr auf der gesamtheitlichen und integralen Zusammenführung und Generalisierung der Lösungskonzepte, um die Interoperabilität aller Verkehrsteilnehmer*innen sicherzustellen.
Ergebnisse
Angestrebte Projektergebnisse sind die Spezifikationen für die Information zum vernetzten Austausch der eigenen Fahr-Intention als Basis für kooperativ, vernetztes Fahren inklusive Interoperabilität zwischen Pkw, Lkw, Motorrad, VRU und Infrastruktur oder die Erkennung und Weitergabe der Information über Bewegungen der VRUs.
Neben inhaltlichen Zielen geht es in COPE auch darum, die österreichische Themenführerschaft im Thema C-ITS zu stärken und weiter auszubauen, das Thema vernetztes, kooperatives Fahren in Österreich und die daraus zu erwartenden, verkehrlichen Vorteile zur Verbesserung der Verkehrssicherheit und Verkehrseffizienz zu realisieren und dass die Projektbeteiligten die Projektergebnisse kommerziell verwerten können bzw. konkrete Produkte abgeleitet werden können.
Projekt-Eckdaten: COPE
Dauer: September 2020 bis August 2022
Förderschiene: Mobilität der Zukunft - 14. Ausschreibung (Herbst 2019)
Projektpartner und assoziierte Partner:
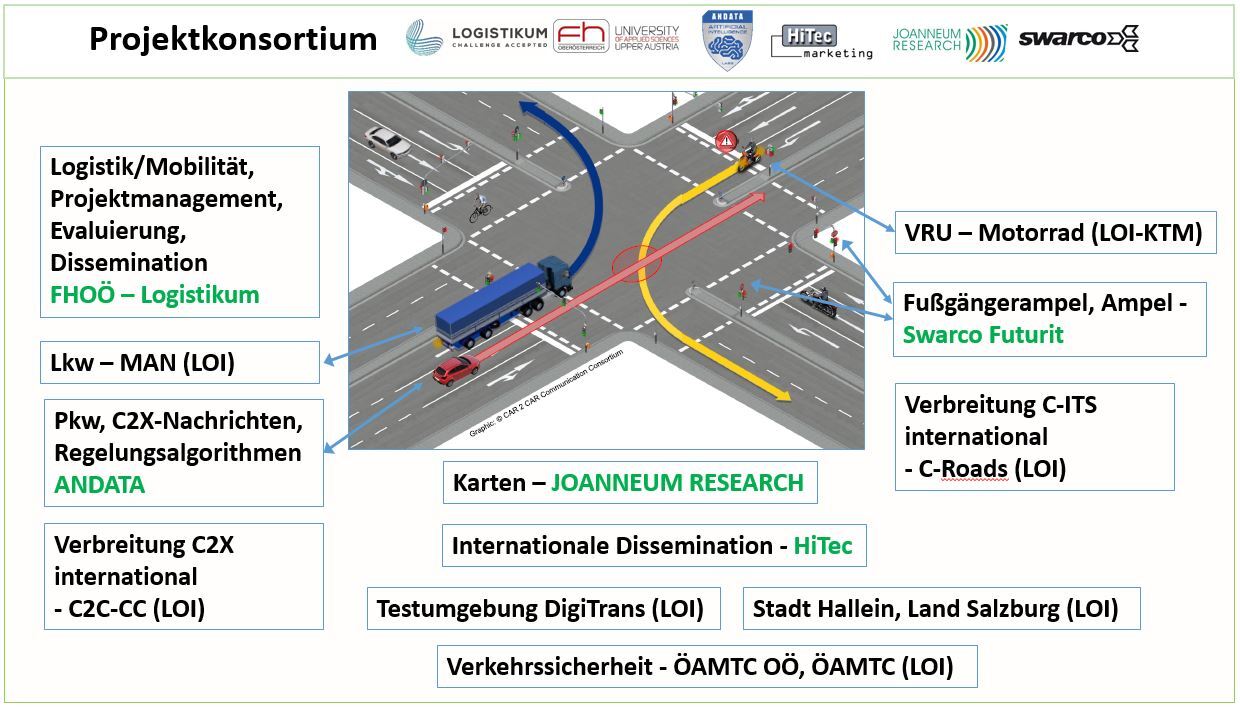
Das COPE Konsortium deckt die wesentlichen Stakeholder ab, um die gesteckten Projektziele zu erreichen. Damit werden die Bereiche Fahrzeugtechnologie (LOI-Partner KTM, MAN, C2C-CC), Infrastrukturtechnologie (Swarco Futurit, LOI-Partner C-Roads), Verkehrssimulation/Regelungsalgorithmen (ANDATA), HD-Karten (JOANNEUM RESEARCH), Verkehrslogistik-Kompetenz (FH OÖ), Verkehrssicherheit (LOI-Partner ÖAMTC OÖ), Testumgebungen (LOI-Partner DigiTrans), Städte und Ländervertreter (LOI-Partner Stadt Hallein und Land Salzburg) und internationale Verwertung (HiTec) abgedeckt. Weiters sind mit dem Konsortium die Voraussetzungen für eine umfassende internationale Exploitation der Ergebnisse sichergestellt.
Die Projektpartner
Das Logistikum der FH Oberösterreich leitet und koordiniert das Projekt COPE. Dazu werden die Belange und Anforderungen des Güterverkehrs zur Erhöhung der Verkehrssicherheit vertreten.
Forschungsteam Logistikum der FH OÖ Campus Steyr:
- Mag. Dr. Wolfgang Schildorfer, Forschungsprofessor
- FH-Prof. Mag. Dr. Matthias Neubauer, MBA, Professor für Logistikinformationssysteme
- DI Christina Flitsch
- DI Laura Simmer
Die Firma ANDATA ist zuständig für die Entwicklung und Bewertung der kooperativen Algorithmen und Regelungsverfahren zur Vermeidung von Kollisionen und gefährlichen Situationen.
Hauptansprechpartner: DDI Dr. Andreas Kuhn.
Die Vereinigung HiTec Marketing ist zuständig für die Dissemination, die Kommunikation und Koordination des Projekts mit nationalen und internationalen Stakeholdern, Projekten und Initiativen.
Hauptansprechpartner: Dr. Walter Aigner
Die JOANNEUM RESEARCH Forschungsgesellschaft ist zuständig für die Form und Inhalte von HD-Karten inklusive statischen und dynamischen Objekten für die passende Entscheidungsfindung zur Vermeidung von Kollisionen und gefährlichen Situationen.
Forschungsteam JOANNEUM RESEARCH:
- DI(FH) Patrick Luley, Koordinator des Forschungsbereichs „Automated Driving“, Leiter des Innovationslabors für hochautomatisiertes Fahren
- DI Stefan Ladstätter, Senior Researcher UHDmaps
- Dr. Richard Ladstädter, Senior Researcher Mobile Mapping
Die Firma Swarco Futurit ist zuständig für die Infrastruktur-seitige Erkennung und Interpretation der Verkehrssituation. Dazu kommen noch die C-ITS-Belange und die Fahrzeug/Infrastruktur-Kommunikation.
Hauptansprechpartner: Dr. Thomas Novak
Assoziierte Partner
Fahrzeughersteller & Technologie:
Die Firma KTM ist der führende europäische Motorrad-Hersteller. KTM ist potentieller Nutzer der Projektergebnisse, um den eigenen Kunden Technologien zur verbesserten Sicherheit für die weitgehende Vermeidung von Motorrad-Unfällen und Kollisionen mit anderen Fahrzeugen zu bieten.
Die Firma MAN ist einer der führenden europäischen Lkw-Hersteller. MAN ist potentieller Nutzer der Projektergebnisse, um die eigenen Lkw sicherer zu machen, indem erweiterte Technologien zur Vermeidung von Kollisionen – insbesondere mit ungeschützten Verkehrsteilnehmern – eingesetzt werden.
Organisationen Fahrzeug-Vernetzung:
Das C2C-Communication Consortium koordiniert und standardisiert Car-2-Car und Car-2-X-Messages für das zukünftige vernetzte Fahren. Das vorliegende Projekt bearbeitet wesentliche Inhalte für das zukünftige kooperative, vernetzte Fahren.
C-Roads ist die europäische Plattform zur harmonisierten Einführung von C-ITS in Europa. Mit dem Projekt werden bereits Entwicklungen für die sogenannten C-ITS Day-2-UseCases vorbereitet.
Der ÖAMTC ist Experte für Fahrzeug- und Verkehrssicherheit auf Anforderungsseite.
Behörden und Infrastruktur
Das Land Salzburg ist Partner-Region von C-Roads und steht vor der Implementierung von Car-2-X-Technologien. Mit den gegebenen Projektinhalten werden bereits jetzt die Möglichkeiten der sogenannten C-ITS Day-2-UseCases für eine weiterführende Verbesserung der Verkehrs- und Fahrzeugsicherheit vorbereitet.
Die Stadt Hallein war bereits Modellregion vom Projekt Connecting Austria. Der dort erstellte Digitale Zwilling der dynamischen Inhalte der Stadt wird im Rahmen des Projekts weiter ausgebaut und für die Validierung der Projektergebnisse verwendet.
Testregion:
DigiTrans ist eine der zwei Testregionen für automatisiertes Fahren in Österreich und bietet Infrastruktur und Services zur Validierung von automatisierten, vernetzten Fahrfunktionen.
Quellen:
Projekt-Webseite: http://www.project-cope.eu/